La programmation
mercredi 7 octobre 2020, par
Pour la programmation, nous allons utiliser la fonction avancer.
Pour un déplacement en ligne droite, c’est assez simple de remplacer cette fonction par un allumage des moteurs.
Dans le cas ou le robot suit une ligne, cette fonction avancer est un sous-programme qui permet au robot de suivre la ligne. Pour en savoir plus, vous pouvez vous référer au tutoriel suivre une ligne.
Attention : Dans un programme, il ne doit y avoir q’une seule boucle infinie. Elle se trouve donc dans notre programme principal que nous allons faire, et non dans le sous programme avancer.
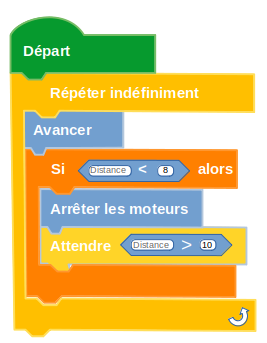
La programmation événementielle
La fonction avancer ajuste la vitesse et la direction du robot. Le capteur arrête les moteurs si on est trop prêt. On attend que l’objet s’éloigne pour repartir.
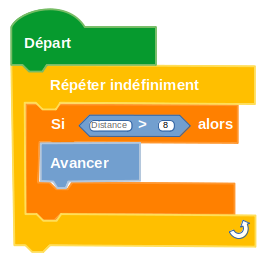
Le programmation séquentielle
A chaque boucle, si on est assez loin de l’obstacle, on avance d’un pas.