S’initier à la programmation robotique
Suivre une ligne
Présentation
Un robot peut avoir plusieurs types de déplacements :
- déplacement en ligne droite
- rotation sur lui même avec un angle défini
- déplacement suivant des courbes aléatoires
Le déplacement offrant le plus de liberté est le déplacement suivant des courbes. Pour ce faire, le robot va devoir suivre un maquage au sol, un peu comme une voiture suit une route.
Pour celà, le robot doit être équipé d’un système de détection, d’un système de propulsion et un système de direction.
Le matériel
Pour le déplacement
Comme indiqué, le robot doit être capable d’avancer mais aussi de tourner. Il y a plusieurs manière de concevoir mécaniquement le robot :
- La technique la plus simple est d’avoir un robot disposant de 2 moteurs commandant indépendamment 2 roues motrices. Lorsque les 2 moteurs tournent à la même vitesse, le robot avance en ligne droite. Si un des deux moteurs tourne plus lentement, le robot effectue un virage sur le coté et si l’on arrête complètement un moteur, le robot pivote sur lui même.
- Comme pour le voiture, on peut utiliser 1 moteur qui va entraîner une ou des roues motrices et un second moteur qui va commander le système de direction.
La seconde solution est beaucoup plus complexe à réaliser.
Quelque soit la solution retenue, le principe de programmation reste le même.
Pour suivre la ligne
Pour suivre la ligne au sol, il va falloir utiliser une capteur :
- capteur de lumière
- ou capteur de couleurs
Dessiner la ligne
La conception du robot et le tracé de la ligne à suivre sont étroitement liés.
Il faut que le rayon de braquage du robot soit plus petit que le rayon de courbure de la ligne.
Si le rayon de la courbure de la ligne est plus petit que celui du rayon de braquage du robot, le robot sortira de la ligne et sera perdu. Il ne sera pas possible de savoir si elle se trouve à droite ou à gauche.
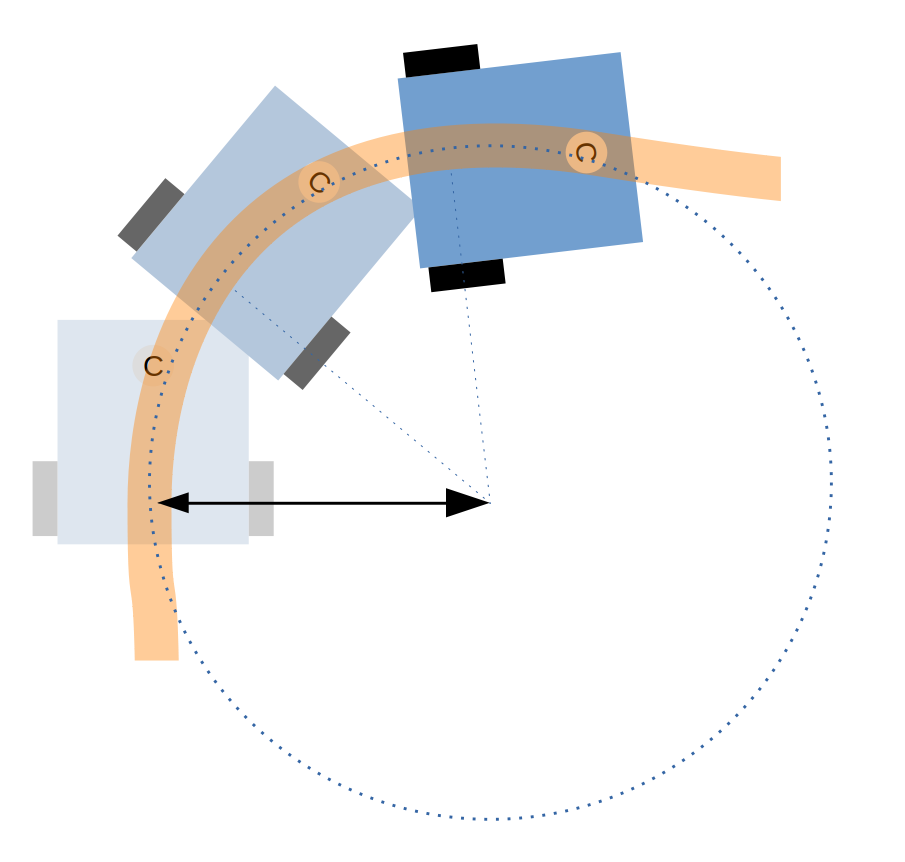
On conçoit dans un premier temps le robot et analyse ou définit un rayon de braquage. Attention à ne pas prendre un rayon trop petit (par exemple, une seule des deux roues tourne), ce qui aura un effet saccadé ou violant du déplacement. On peut alors dessiner le parcours.
1 ou 3 couleurs, une contrainte technique
Pour tracer la ligne on a deux possibilités :
- utiliser une seule couleur : capteur de lumière ou capteur de couleurs
- utiliser trois couleurs : capteur de couleurs uniquement
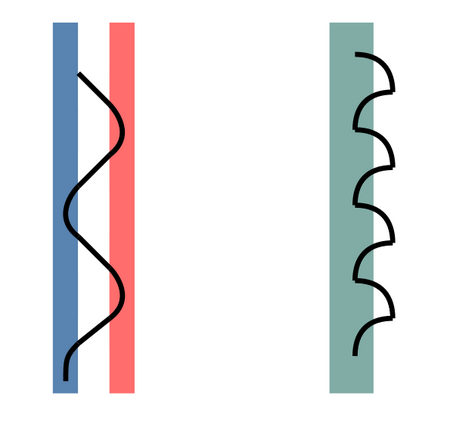
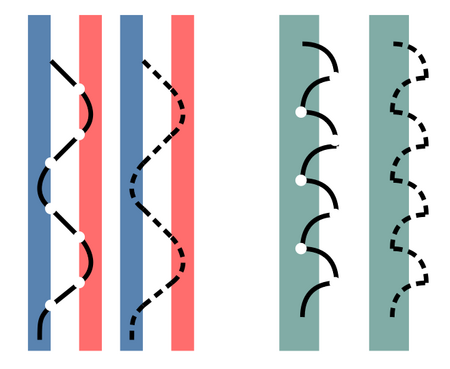
Une seule couleur
Dans la cas ou l’on utilise une couleur, le capteur détecte alors de lumière ou pas de lumière. Le robot va se déplacer sur le bord de la ligne, autour de cette limite contrastée. Il effectue alors en permanence des déplacements gauche-droite.
D’après notre dessin, lorsqu’il détecte une couleur sombre, il tourne à droite. Lors qu’il détecte une couleur claire, il tourne à gauche.
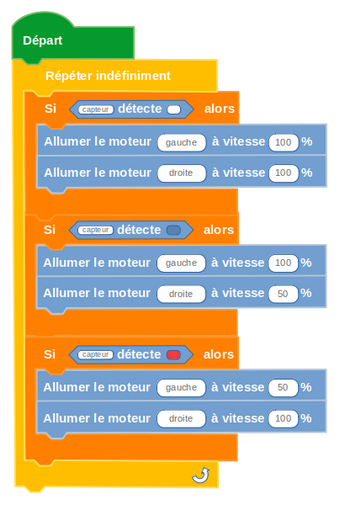
Trois couleurs
Comme on peut le voir, le mouvement du robot sur une ligne à 3 couleurs est beaucoup plus fluide. En plus des déplacements gauche droite, il se déplace aussi en ligne droite. C’est ce dernier mouvement qui limite les à-coups.
Ici, lorsque le robot détecte du bleu, à gauche, il tourne vers la droite chercher du blanc. Lorsqu’il est sur le blanc, il avance en ligne droite. Lorsqu’il arrive sur le rouge, il tourne vers la gauche jusqu’à revenir sur le blanc.
Programmer le robot
Il y a deux manières de programmer le robot :
- La programmation événementielle : le robot change de comportement au changement de couleur
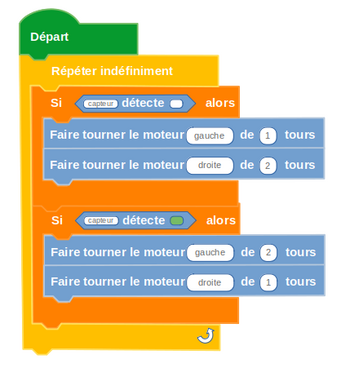
- La programmation séquentielle : le robot effectue un petit mouvement en fonctionne de la couleur qu’il détecte
Dans la programmation séquentielle, on demande aux moteurs de tourner d’un nombre de tours définis (puis ils s’arrêtent tout seul et recommence).
Dans la programmation événementielle, on allume les moteurs à une certaine vitesse. Il faut alors ordonner un changement de vitesse ou un arrêt des moteurs lors d’autres événements.
La programmation séquentielle
La programmation événementielle
Les défis associés
Il y a 6 défis associés au thème .
Légo Spike suit la ligne noire circulaire
Le robot suit la ligne noire circulaire
Maqueen suit la ligne noire
Le robot suit une ligne noire
La fourmi
Le robot mBot équipé de pattes doit suivre un ligne
Course en ligne
Objectif : Suivi de ligne large avec des virages larges (>90°) Votre robot est-il capable de (...)
Suivre une ligne
Programmer un robot pour qu’il suive une ligne de couleur au sol
S’arrêter devant un piéton
Programmer le robot pour qu’il s’arrête à bonne distance du piéton. Il repart une fois le piéton éloigné.