S’initier à la programmation robotique
Un programme multi-actions
Présentation
Un programme finalisé est un programme qui fait faire au robot plusieurs tâches que l’on peut croire "simultanées".
Par exemple, le robot planteur d’arbres du concours RobotY’c Saison 3 doit en permanence :
– suivre une ligne pour se déplacer
– s’arrêter devant un piéton
– détecter des marques au sol pour prendre ou poser un arbre
Le principe
Le principe du programme multi-actions est un peu comme un poisson rouge dans un bocal qui n’a que 3 secondes de mémoire. Il se pose les questions "Est-ce que j’ai faim ?", "Où est la nourriture ?" toutes les 3s.
Une carte électronique qui exécute un programme est bien sûr plus rapide que 3 secondes.
Dans le cas du robot planteur d’arbre, le robot va en permanence se poser les questions
– Où suis-je sur la route ?
– Y-a-t-il un obstacle devant moi ?
– Suis-je au dessus d’une marque au sol pour prendre un arbre ?
Ce cycle de questions est très rapide, ne prend que quelques millisecondes.
La meilleure méthode de programmation est donc la programmation séquentielle.
La programmation
Dans son déplacement, le robot doit donc analyser le monde environnant et se poser 3 questions :
– Où suis-je sur la route ?
– Y-a-t-il un obstacle devant moi ?
– Suis-je au dessus d’une marque au sol pour prendre un arbre ?
En programmation, c’est question sont des fonctions qui font des actions tenant compte d’informations recueillies par les capteurs.
Voici donc la structure que pourrait prendre le programme.
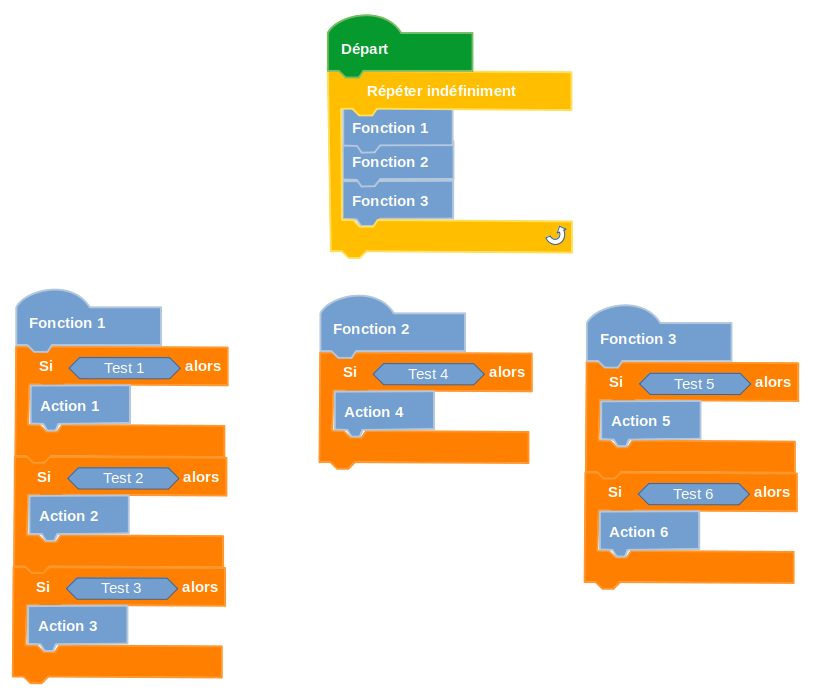
Attention : La boucle infinie est sur le programme principal. Elle n’est pas dans les sous programmes comme suivre la ligne ou détecter un piéton.