Pour aller plus loin
mercredi 7 octobre 2020, par
Lors de la détection d’un obstacle, il peut être demandé au robot d’effectuer une manœuvre d’évitement ou une manœuvre de demi-tour.
Cette fonction manœuvrer est donc un sous-programme qui pilote manuellement le robot.
Voici comment l’intégrer au programme
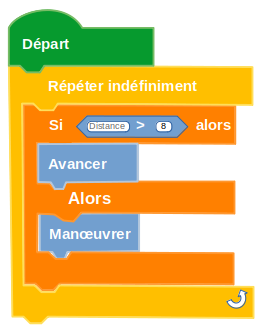
Programmation événementielle
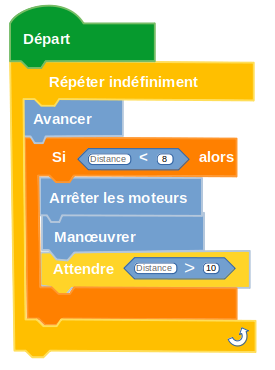
Programmation séquentielle