Défi
Contrôler deux servomoteurs à rotations continues avec un capteur ultrason
samedi 24 novembre 2018, par
Compétences travaillées
C4. Décomposer un problème en sous-problèmes
C4. Ecrire, mettre au point et exécuter un programme en réponse à un problème donné
C4. Ecrire un programme dans lequel des actions sont déclenchées par des évènements extérieurs
C4. Notion de variable informatique
C4. Notion de boucles
C4. Notion d’instructions conditionnelles
C4. Ecrire, mettre au point et exécuter un programme commandant un système réel
C4. Notion de capteur, actionneur et interface
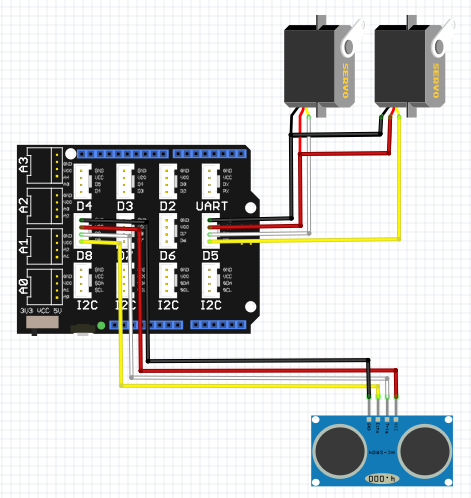
Branchements
1 – Brancher les moteurs sur D5 (moteur droit) et D6 (moteur gauche)
2 – Installer le capteur ultrason puis le brancher sur D8 (Echo) et D9 (Trig)
Le défi est le suivant :
Votre robot doit pivoter sur lui-même puis avancer vers tout objet qu’il détectera dans une distance comprise entre 0 et 50 cm autour de lui pour le pousser.
Voici ce que cela peut donner :